Die Hardware

Der Servomotor SG90 ist ein spezieller Elektromotor, der sich jeweils um 180° nach links und nach rechts drehen kann und auf eine bestimmte Position innerhalb des Radius von 180° gefahren werden kann.
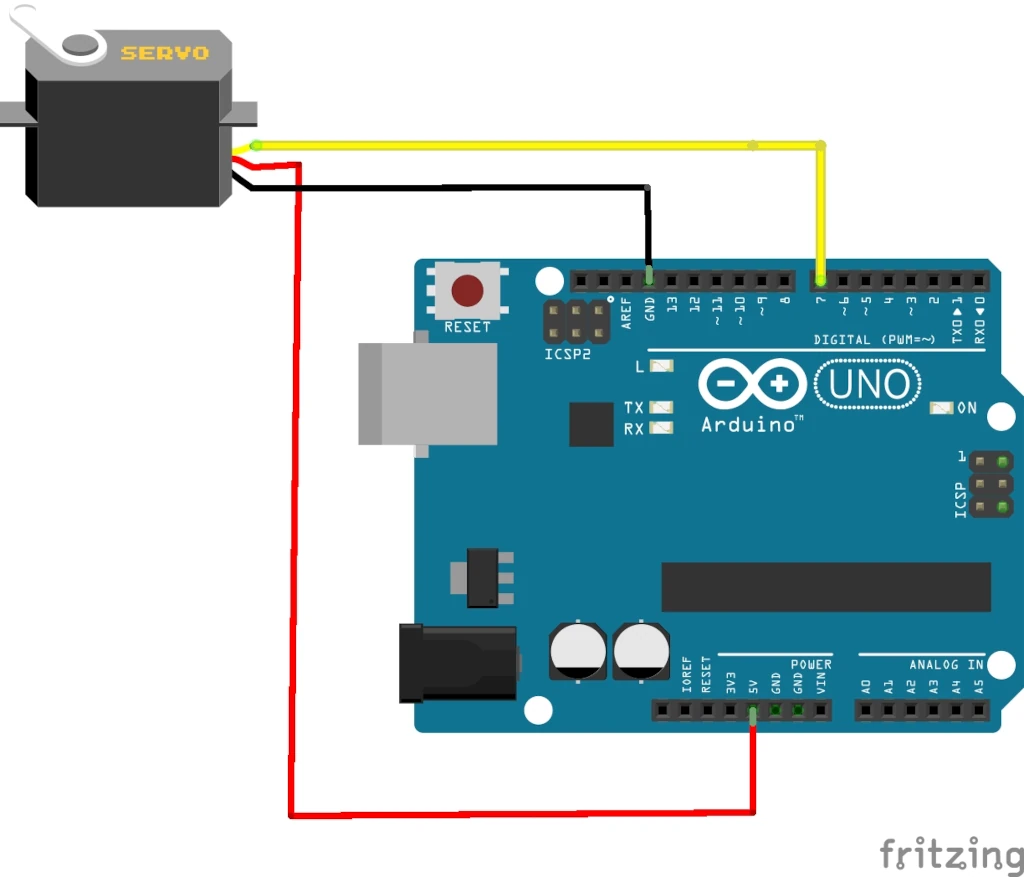
Der Schaltplan
Erläuterungen
- Zunächst wird die benötigte Bibliothek Servo.h mit #include eingebunden
- der Servo wird mit Motor bezeichnet und die Startposition ist 0
- im setup-Teil wird der Motor dem Pin 7 zugeordnet
- im loop-Teil bewegen zwei ⇒for-Schleifen den Motor zunächst in die eine Richtung bis auf 180° und anschließend wieder zurück auf 0°
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 |
// benötigte Bibliothek einbinden #include "Servo.h" // Bezeichnung des Motors Servo Motor; // Startosition des Motors int Position = 0; void setup() { // Motor an Pin 7 angeschlossen (attach) Motor.attach(7); } void loop() { // von 0 bis 180 drehen for (Position = 0; Position < 180; Position++) { Motor.write(Position); delay(10); } // von 180° zurück auf 0° drehen for (Position = 180; Position > 0; Position--) { Motor.write(Position); delay(10); } } |
Letzte Aktualisierung: