Überblick
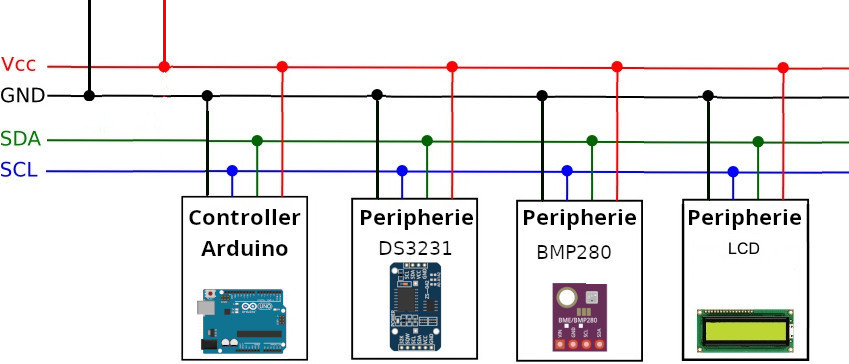
Der I²C-Bus (Inter Integrated Circuit) wurde ursprünglich von Philips entwickelt, er sollte die Kommunikation mit einem Controller (dem Arduino) und den verschiedenen Peripherie-Geräten ermöglichen.
Wenn mehrere Peripherie-Geräten verwendet werden, können die Anschlüsse SCL und SDA auf das Steckbrett hinaus geführt werden und die Peripherie-Geräten werden an den horizontalen Pins angeschlossen.
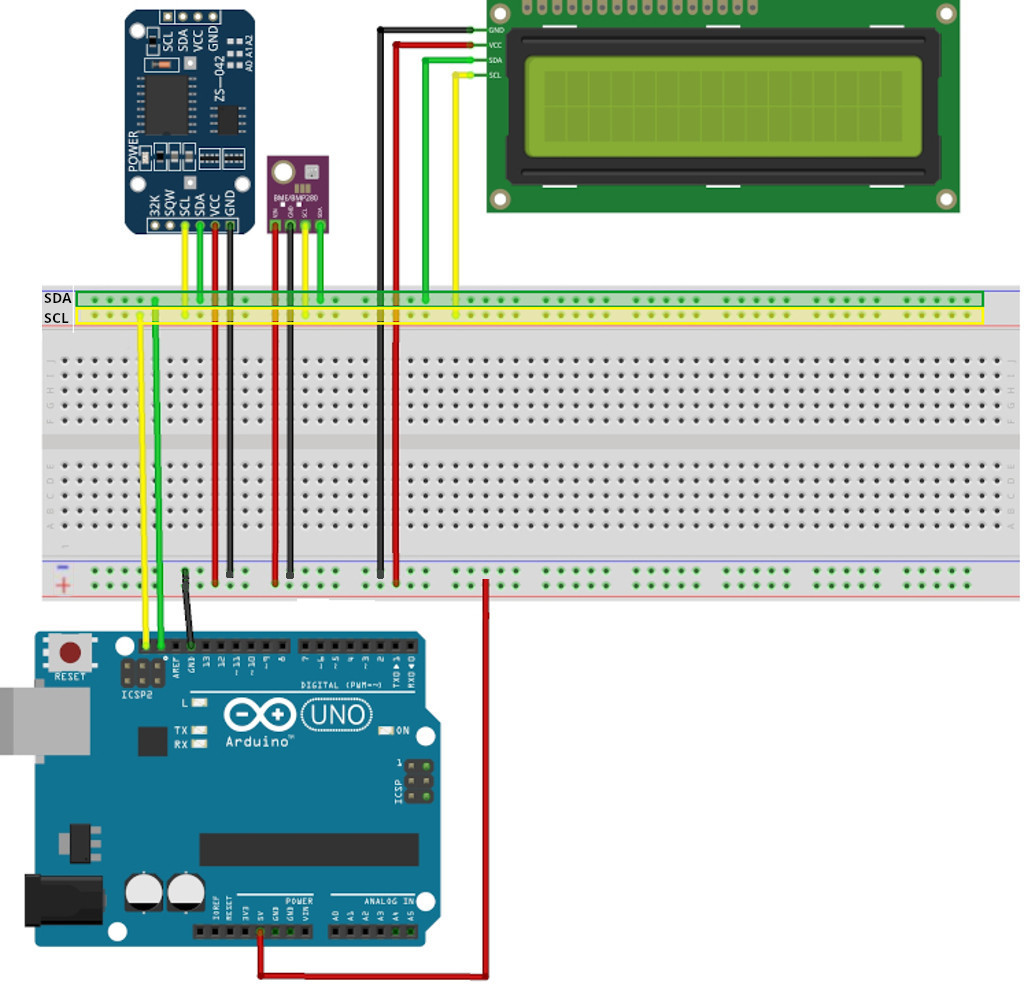
Beispiel Arduino UNO
Der dazugehörige Schaltplan:
I²C-Bus
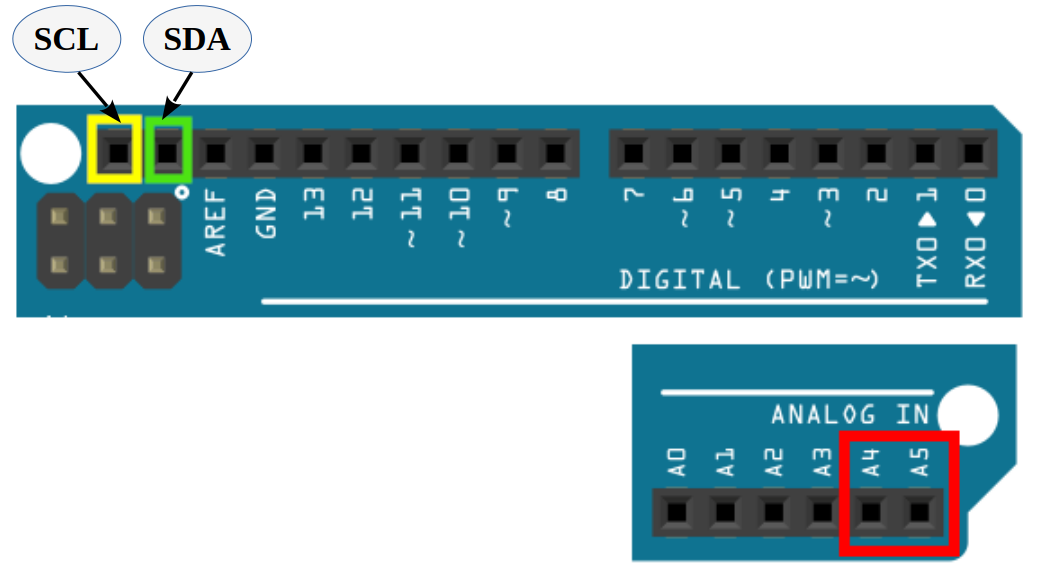
Der I²C-Bus kommt mit zwei Datenleitungen aus:
- die Taktleitung SCL (Serial Clock) ⇒ A5
- die Datenleitung SDA (Serial Data) ⇒ A4
Statt A4 (SDA) und A5 (SCL) kannst du auch die mit SCL und SDA beschrifteten Pins verwenden.
I²C-Pins anderer Mikrocontroller
- ESP32-Wroom
- ESP32C6
- Arduino Nano ESP32
- XIAO-ESP32-C3
- ESP32-C3 Zero
- ESP32-C3 Super Mini
- Wemos D1
- NodeMCU
I²C-Pins festellen
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
void setup() { Serial.begin(9600); // auf serielle Verbindung warten while (!Serial); delay(1000); Serial.print("SDA: "); Serial.println(SDA); Serial.print("SCL: "); Serial.println(SCL); } void loop() { // bleibt leer, läuft nur einmal } |
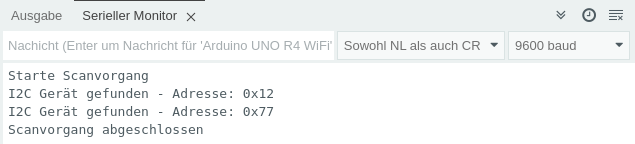
Adressen der angeschlossenen Geräte
Jedes Bauteil, das mit I2C angesteuert wird, hat eine eigene Adresse.
Diese kannst du mit einem Programm herausfinden:
I²C-Bus mit definierten SCL/SDA-Pins
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 |
#include "Wire.h" void setup() { Wire.begin(); Serial.begin(9600); delay(500); Serial.print("I2C Scanner"); } void loop() { byte Fehler, Adresse; int Geraete = 0; Serial.println("Starte Scanvorgang"); for (Adresse = 1; Adresse < 127; Adresse++ ) { // Übertragung starten Wire.beginTransmission(Adresse); // wenn die Übertragung beendet wird Fehler = Wire.endTransmission(); if (Fehler == 0) { Serial.print("I2C Gerät gefunden - Adresse: 0x"); if (Adresse < 16) Serial.print("0"); Serial.print(Adresse, HEX); Serial.println(""); Geraete++; } } if (Geraete == 0) Serial.println("Keine I2C Geräte gefunden\n"); else Serial.println("Scanvorgang abgeschlossen"); delay(5000); } |
I²C-Bus mit variablen SCL/SDA-Pins
ESP32-C6/ESP32-C6 Zero
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 |
#include "Wire.h" #define SDA_PIN 14 #define SCL_PIN 15 void setup() { Wire.begin(SDA_PIN, SCL_PIN); Serial.begin(9600); delay(500); Serial.print("I2C Scanner"); } void loop() { byte Fehler, Adresse; int Geraete = 0; Serial.println("Starte Scanvorgang"); for (Adresse = 1; Adresse < 127; Adresse++ ) { // Übertragung starten Wire.beginTransmission(Adresse); // wenn die Übertragung beendet wird Fehler = Wire.endTransmission(); if (Fehler == 0) { Serial.print("I2C Gerät gefunden - Adresse: 0x"); if (Adresse < 16) Serial.print("0"); Serial.print(Adresse, HEX); Serial.println(""); Geraete++; } } if (Geraete == 0) Serial.println("Keine I2C Geräte gefunden\n"); else Serial.println("Scanvorgang abgeschlossen"); delay(5000); } |
I²C-Bus mit QWIIC-Stecker
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 |
#include "Wire.h" void setup() { Wire1.begin(); Serial.begin(9600); delay(500); Serial.print("I2C Scanner"); } void loop() { byte Fehler, Adresse; int Geraete = 0; Serial.println("Starte Scanvorgang"); for (Adresse = 1; Adresse < 127; Adresse++ ) { // Übertragung starten Wire1.beginTransmission(Adresse); // wenn die Übertragung beendet wird Fehler = Wire1.endTransmission(); if (Fehler == 0) { Serial.print("I2C Gerät gefunden - Adresse: 0x"); if (Adresse < 16) Serial.print("0"); Serial.print(Adresse, HEX); Serial.println(""); Geraete++; } } if (Geraete == 0) Serial.println("Keine I2C Geräte gefunden\n"); else Serial.println("Scanvorgang abgeschlossen"); delay(5000); } |
Letzte Aktualisierung: