|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 |
#include "Servo.h" // Bezeichnung des Motors Servo Motor; int Position; int TASTER = 7; int TasterLesen; int LAUTSPRECHER = 6; void setup() { pinMode(TASTER, INPUT_PULLUP); pinMode(LAUTSPRECHER, OUTPUT); // Pin 9 dem Motor zuordnen Motor.attach(9); // Zufallsgenerator starten randomSeed(A0); // Motor nach links fahren Motor.write(180); } void loop() { TasterLesen = digitalRead(TASTER); if (TasterLesen == LOW) { delay(500); int Minimum = 5; int Maximum = 175; int Position = random(Minimum, Maximum); Motor.write(Position); delay(500); if (Position > 45 && Position < 90) { // Frequenzbereich 1000 bis 2000 for (int i = 1000; i <= 2000; i += 100) { tone(LAUTSPRECHER, i); delay(100); noTone(LAUTSPRECHER); } for (int i = 2000; i > 1000; i -= 100) { tone(LAUTSPRECHER, i); delay(100); noTone(LAUTSPRECHER); } } } } |
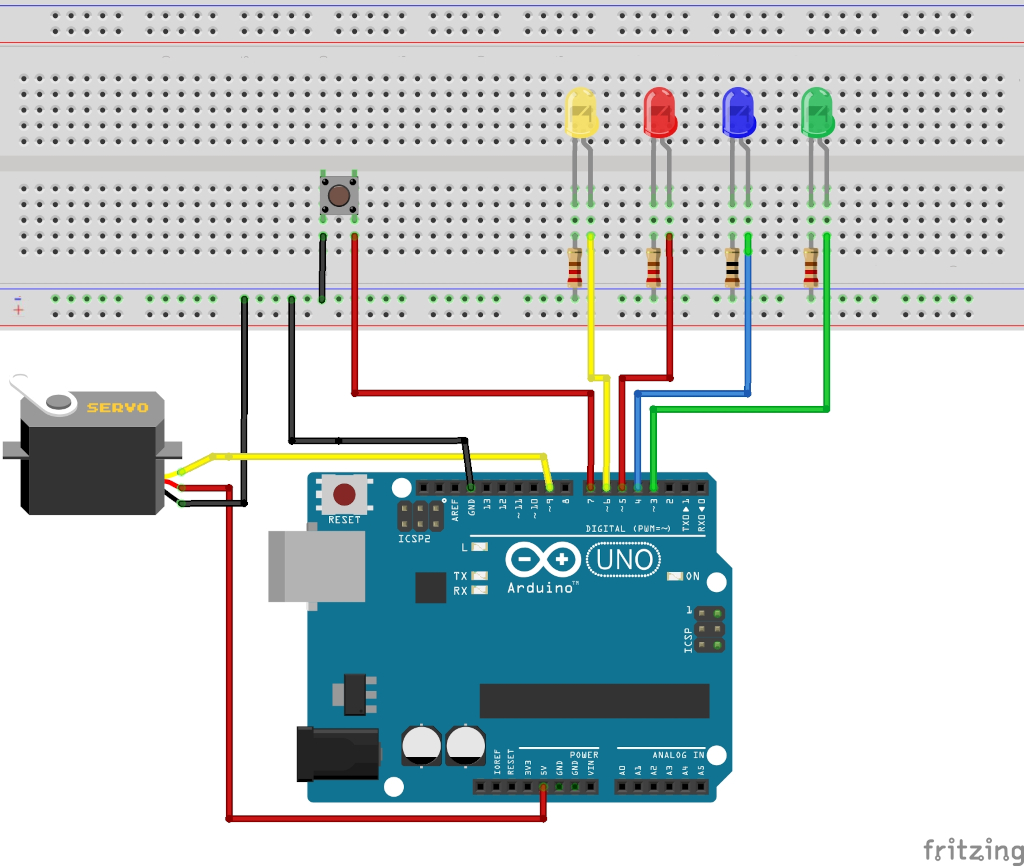
Mit farbigen LEDs
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 |
#include "Servo.h" // Bezeichnung des Motors Servo Motor; int Position; int TASTER = 7; int TasterLesen; int gelbeLED = 6; int roteLED = 5; int blaueLED = 4; int grueneLED = 3; void setup() { pinMode(TASTER, INPUT_PULLUP); for (int i = 3;i < 7; i++) { pinMode(i, OUTPUT); } // Pin 9 dem Motor zuordnen Motor.attach(9); // Zufallsgenerator starten randomSeed(A0); // Motor nach links fahren Motor.write(0); } void loop() { TasterLesen = digitalRead(TASTER); if (TasterLesen == LOW) { delay(500); for (int i = 3;i < 7; i++) { digitalWrite(i, LOW); } int Minimum = 5; int Maximum = 175; int Position = random(Minimum, Maximum); Motor.write(Position); delay(500); switch (Position) { case 0 ... 45: digitalWrite(gelbeLED, HIGH); break; case 46 ... 90: digitalWrite(roteLED, HIGH); break; case 91 ... 135: digitalWrite(blaueLED, HIGH); break; case 136 ... 180: digitalWrite(grueneLED, HIGH); break; } } } |
Letzte Aktualisierung: